Produtos
AGV - Veículo guiado automatizado
Proteção total de alto desempenho Lurking AGV



O Robô móvel latente series move prateleiras de estoque ou paletes para a estação de coleta por meio de seu mecanismo de elevação. Ele otimizou o desempenho de movimento e melhorou a proteção de segurança, oferecendo soluções altamente produtivas e econômicas de produtos para pessoas.
Para a movimentação no armazém ou a ligação entre a linha de produção e o armazém, o AGV de movimentação flexível é selecionado para substituir a empilhadeira tradicional e outras ferramentas de movimentação de acordo com a demanda do fluxo. Kingmore smart forma interação de informações entre o sistema de manuseio, armazém e linha de produção, o que pode garantir a rastreabilidade das informações em todo o link, criar uma produção inteligente e flexível e reduzir a demanda de uso manual.
1. Tipo de elevador
O robô de elevação é um equipamento logístico automatizado que pode realizar carregamento, elevação e transporte autônomos. Caracteriza-se por estar equipado com um dispositivo de elevação, que pode elevar a mercadoria do solo até uma posição mais elevada para realizar tarefas como movimentação e armazenamento. Geralmente usado em aplicações de logística industrial e de armazenamento, pode efetivamente melhorar a eficiência da produção e reduzir os custos logísticos.
Q2-400D | Altura de elevação (mm) | 60 |
| Carga especificada (kg) | 400 | |
| Navegação | Código QR/LSLAM | |
| Capacidade de rampa(°) | 3 | |
| Diâmetro de rotação (mm) | 820 | |
| Tempo nominal de operação(h) | 8 | |
| Dimensões C*L*A(mm) | 780*545*300 | |
| Velocidade nominal de operação (sem carga) (m/s) | 2,0 | |
| Peso (kg) | 93 | |
| Precisão de posicionamento (mm,°) | ±10/±1 | |
| Tempo de carregamento (h) | ≤1,5 | |
| Modo de direção | acionamento diferencial |
Q3-600D | Altura de elevação (mm) | 60 |
| Carga especificada (kg) | 600 | |
| Navegação | Código QR/LSLAM | |
| Capacidade de rampa(°) | 3 | |
| Diâmetro de rotação (mm) | 995 | |
| Tempo nominal de operação(h) | 8 | |
| Dimensões C*L*A(mm) | 950*650*250 | |
| Velocidade nominal de operação (sem carga) (m/s) | 2,0 | |
| Peso (kg) | 132 | |
| Precisão de posicionamento (mm,°) | ±10/±1 | |
| Tempo de carregamento (h) | ≤1,5 | |
| Modo de direção | acionamento diferencial |
Q7-1000E | Altura de elevação (mm) | 60 |
| Carga especificada (kg) | 1000 | |
| Navegação | Código QR/LSLAM | |
| Capacidade de rampa(°) | 3 | |
| Diâmetro de rotação (mm) | 1200 | |
| Tempo nominal de operação(h) | 8 | |
| Dimensões C*L*A(mm) | 1150*820*254 | |
| Velocidade nominal de operação (sem carga) (m/s) | 2,0 | |
| Peso (kg) | 172 | |
| Precisão de posicionamento (mm,°) | ±10/±1 | |
| Tempo de carregamento (h) | ≤1,5 | |
| Modo de direção | acionamento diferencial |
Q8-2000A | Altura de elevação (mm) | 100 |
| Carga especificada (kg) | 2000 | |
| Navegação | Código QR/LSLAM | |
| Capacidade de rampa(°) | 3 | |
| Diâmetro de rotação (mm) | 1780 | |
| Tempo nominal de operação(h) | 8 | |
| Dimensões C*L*A(mm) | 1523*1150*327 | |
| Velocidade nominal de operação (sem carga) (m/s) | 0,9 | |
| Peso (kg) | 550 | |
| Precisão de posicionamento (mm,°) | ±10/±1 | |
| Tempo de carregamento (h) | ≤1,5 | |
| Modo de direção | acionamento diferencial |
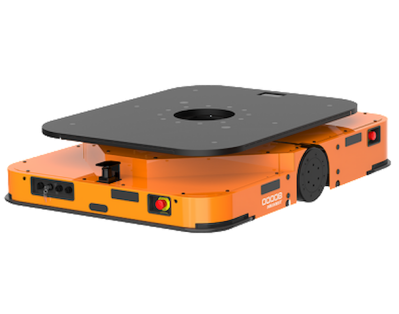
2. Tipo de chassi
O veículo com chassi de robô latente é uma plataforma de robô com funções de expansão de camada superior e recursos de mobilidade de chassi. Sua característica é que a mesa possui furos de montagem superiores próprios, e é fornecida uma placa de interface integrada para o mecanismo superior obter interfaces de hardware; pode se adaptar a uma variedade de necessidades de expansão superiores, como rolos, pequenos braços robóticos, câmeras de inspeção, equipamentos de detecção ambiental, etc., e tem funções ricas Capacidades de desenvolvimento e expansão secundárias podem ser amplamente utilizadas em vários setores industriais, de armazenamento e logística, fabricação inteligente e outros cenários.
Q3B-600C-D | Altura de elevação (mm) | / |
| Carga especificada (kg) | 600 | |
| Navegação | Código QR | |
| Capacidade de rampa(°) | 3 | |
| Diâmetro de rotação (mm) | 995 | |
| Tempo nominal de operação(h) | 8 | |
| Dimensões C*L*A(mm) | 950*650*300 | |
| Velocidade nominal de operação (sem carga) (m/s) | 2,0 | |
| Peso (kg) | 126 | |
| Precisão de posicionamento (mm,°) | ±10/±1 | |
| Tempo de carregamento (h) | ≤1,5 | |
| Modo de direção | acionamento diferencial |
Q3B-600L-D | Altura de elevação (mm) | / |
| Carga especificada (kg) | 600 | |
| Navegação | LSLAM | |
| Capacidade de rampa(°) | 3 | |
| Diâmetro de rotação (mm) | 995 | |
| Tempo nominal de operação(h) | 8 | |
| Dimensões C*L*A(mm) | 950*650*300 | |
| Velocidade nominal de operação (sem carga) (m/s) | 2,0 | |
| Peso (kg) | 126 | |
| Precisão de posicionamento (mm,°) | ±10/±1 | |
| Tempo de carregamento (h) | ≤1,5 | |
| Modo de direção | acionamento diferencial |
Q7B-1000C-E | Altura de elevação (mm) | / |
| Carga especificada (kg) | 1000 | |
| Navegação | Código QR | |
| Capacidade de rampa(°) | 3 | |
| Diâmetro de rotação (mm) | 1200 | |
| Tempo nominal de operação(h) | 8 | |
| Dimensões C*L*A(mm) | 1150*820*300 | |
| Velocidade nominal de operação (sem carga) (m/s) | 2,0 | |
| Peso (kg) | 184 | |
| Precisão de posicionamento (mm,°) | ±10/±1 | |
| Tempo de carregamento (h) | ≤1,5 | |
| Modo de direção | acionamento diferencial |
Q7B-1000L-E | Altura de elevação (mm) | / |
| Carga especificada (kg) | 1000 | |
| Navegação | LSLAM | |
| Capacidade de rampa(°) | 3 | |
| Diâmetro de rotação (mm) | 1200 | |
| Tempo nominal de operação(h) | 8 | |
| Dimensões C*L*A(mm) | 1150*820*300 | |
| Velocidade nominal de operação (sem carga) (m/s) | 2,0 | |
| Peso (kg) | 184 | |
| Precisão de posicionamento (mm,°) | ±10/±1 | |
| Tempo de carregamento (h) | ≤1,5 | |
| Modo de direção | acionamento diferencial |
CARACTERÍSTICAS DE Empilhadeira AGV
Aplicativos




Add: NO.409 West Jianshe Road, Economic Development Zone, Jinhu County, Jiangsu Province, China
Continue lendo, mantenha-se informado, inscreva-se e convidamos você a nos dizer o que pensa.



direito autoral
2026@ Jiangsu Kingmore Storage Equipment Manufacturing Co., Ltd Todos os direitos reservados.
Mapa do site
| Blog
| Xml
| política de Privacidade
 REDE SUPORTADA
REDE SUPORTADA
 português
português English
English español
español 日本語
日本語 한국의
한국의 Deutsch
Deutsch français
français العربية
العربية 中文
中文 русский
русский